Tenkte eg skulle vise korleis ein enkelt (og billig) kan lage ein robot. Som fattig student har ein gjerne ikkje råd til å bruke fleire hundre kroner på eit enkelt robot-chassis. Då er det greit at biltema har billige radiostyrte bilar til salgs.
Sjølv har eg brukt http://www.biltema.no/no/Fritid/Lek-...urrebil-45743/ til 119,- som basis for min robot. Her får ein med motorar, motordrivarar, batteriholdar og, om ein vil, radiostyring.
Guiden viser korleis ein kan bruke denne RC-bilen som basis for ein arduino-robot ved gjere eit par enkle endringar i krinsen. (Utan RC)
Under panseret på bilen finn ein eit kretskort. På kortet står det ein slik chip:
 \
\
Denne tar imot signal frå fjernkontrollen, og sender ut signal til motordriverane via pin 6, 7, 10 og 11. Viss ein fjerner chipen, og istaden koplar inn ein arduino på dei fire pinnane, vil ein kunne kontrollere motorane frå arduinoen.
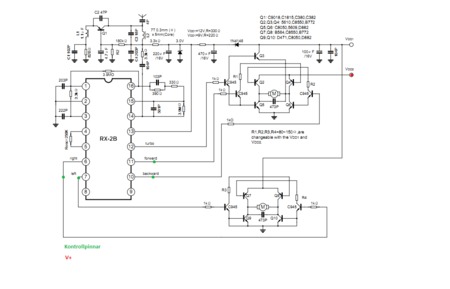
Ser ein vekk ifrå «turbo»-delen, er krinsen omtrent slik:
 \
\
Chipen fjernast frå krinsen, og istaden loddar ein inn ledningar frå punkta der pin 6, 7, 10 og 11 hadde vore. Desse ledningane koplar ein inn på kvar sin digitale utgang på arduinoen. Dersom ein vil ha moglegheit til å kontrollere fart via PWM, må ein bruke utgangane markert med "~".
I tillegg må ein kople arduinoen til batteripakken. På krestkortet, er det kopla til ein feit raud ledning (merka på kortet med V+) og ein feit svart ledning(Merka med V-). Frå V+, strekk ein ein ledning til Vin på arduinoen. Frå V- strekk ein ein ledning til gnd på arduinoen.
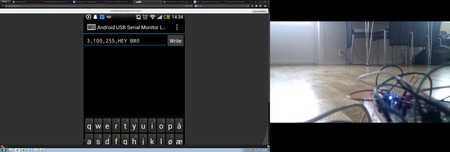
No kan ein kontrollere dei forskjellige motorane ved å bruke digitalWrite/analogWrite
Hugs å slå av straumen frå batteripakka før du koplar arduinoen til pcen
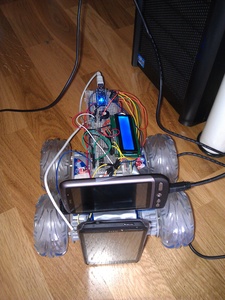
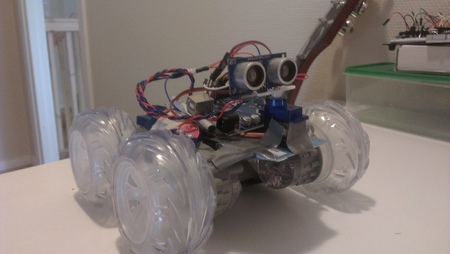
Her er min robot:
 \
\
http://www.youtube.com/watch?v=tbYcX...ature=youtu.be (Eit lite uhell på slutten)
Styrt med sonar.
Sjølv har eg brukt http://www.biltema.no/no/Fritid/Lek-...urrebil-45743/ til 119,- som basis for min robot. Her får ein med motorar, motordrivarar, batteriholdar og, om ein vil, radiostyring.
Guiden viser korleis ein kan bruke denne RC-bilen som basis for ein arduino-robot ved gjere eit par enkle endringar i krinsen. (Utan RC)
Under panseret på bilen finn ein eit kretskort. På kortet står det ein slik chip:
\Denne tar imot signal frå fjernkontrollen, og sender ut signal til motordriverane via pin 6, 7, 10 og 11. Viss ein fjerner chipen, og istaden koplar inn ein arduino på dei fire pinnane, vil ein kunne kontrollere motorane frå arduinoen.
Ser ein vekk ifrå «turbo»-delen, er krinsen omtrent slik:
\Chipen fjernast frå krinsen, og istaden loddar ein inn ledningar frå punkta der pin 6, 7, 10 og 11 hadde vore. Desse ledningane koplar ein inn på kvar sin digitale utgang på arduinoen. Dersom ein vil ha moglegheit til å kontrollere fart via PWM, må ein bruke utgangane markert med "~".
I tillegg må ein kople arduinoen til batteripakken. På krestkortet, er det kopla til ein feit raud ledning (merka på kortet med V+) og ein feit svart ledning(Merka med V-). Frå V+, strekk ein ein ledning til Vin på arduinoen. Frå V- strekk ein ein ledning til gnd på arduinoen.
No kan ein kontrollere dei forskjellige motorane ved å bruke digitalWrite/analogWrite
Hugs å slå av straumen frå batteripakka før du koplar arduinoen til pcen
Her er min robot:
\http://www.youtube.com/watch?v=tbYcX...ature=youtu.be (Eit lite uhell på slutten)
Styrt med sonar.
Sist endret av jarinalus; 14. september 2013 kl. 16:41.