Eg har to arduinoar på kontrollen til roboten min. Den eine er kopla til ein g-sensor. Den andre er kopla til ein nRF905-sendar. Målet mitt er at arduinoen som er kopla til g-sensoren skal kunne sende eit array med kommandoar til den andre arduinoen. Denne sender dette vidare til nRF905.
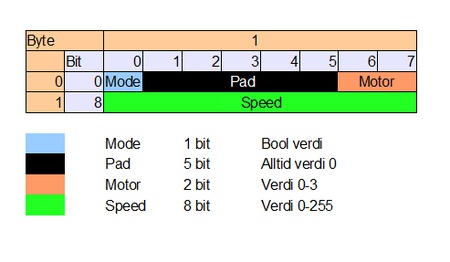
Arrayet skal sjå slik ut: [mode byte (1 eller 0), byte for kva motor som skal drivast (1-4), speed control (0-255)]
Eg får sendt arrayet ut frå den første arduinoen, men når eg skal motta og sende vidare med den andre, brukar den altfor lang tid på å motta data. Roboten blir med andre ord ståande i ro.
Kode arduino 1:
Arduino 2:
Som de kan sjå har eg også problemar med at Serial.readBytes gir ut data i form av char. Medan nRF905 berre kan handtere byte.
Baud rate er satt til 115200kbps for begge arduinoane
Er det nokon som har peiling på overføring av arrays her?
Arrayet skal sjå slik ut: [mode byte (1 eller 0), byte for kva motor som skal drivast (1-4), speed control (0-255)]
Eg får sendt arrayet ut frå den første arduinoen, men når eg skal motta og sende vidare med den andre, brukar den altfor lang tid på å motta data. Roboten blir med andre ord ståande i ro.
Kode arduino 1:
Kode
int g_sensor_x;
int g_sensor_y;
byte data[3];
g_sensor(g_sensor_x, g_sensor_y); // Hentar data frå g-sensor. x og y varierer mellom -255 og 255 etter kva g-krefter sensoren er utsatt for.
byte data[3];
while(g_sensor_x > 0 && g_sensor_x > -g_sensor_y && g_sensor_x > g_sensor_y)
{
data[0]=0;
data[1]=1;
data[2]=g_sensor_x;
Serial.write(data, 3);
g_sensor(g_sensor_x, g_sensor_y);
}
while(g_sensor_x < 0 && -g_sensor_x > -g_sensor_y && -g_sensor_x > g_sensor_y)
{
data[0]=0;
data[1]=2;
data[2]=-g_sensor_x;
Serial.write(data, 3);
g_sensor(g_sensor_x, g_sensor_y);
}
while(g_sensor_y >0 && g_sensor_y > -g_sensor_x && g_sensor_y > g_sensor_x)
{
data[0]=0;
data[1]=3;
data[2]=g_sensor_y;
Serial.write(data, 3);
g_sensor(g_sensor_x, g_sensor_y);
}
while (g_sensor_y < 0 && -g_sensor_y > -g_sensor_x && -g_sensor_y > g_sensor_x)
{
data[0]=0;
data[1]=4;
data[2]=-g_sensor_y;
Serial.write(data, 3);
g_sensor(g_sensor_x, g_sensor_y);
}
Kode
byte data[3];
char seriell_data[3];
while(Serial.available())
{
Serial.readBytes(seriell_data, 3);
data[0] = seriell_data[0];
data[1] = seriell_data[1];
data[2] = seriell_data[2];
nRF905_setTXAddress(TXADDR);
nRF905_setData(data, sizeof(data));
while(!nRF905_send());
}
Baud rate er satt til 115200kbps for begge arduinoane
Er det nokon som har peiling på overføring av arrays her?