Siste prosjekt:
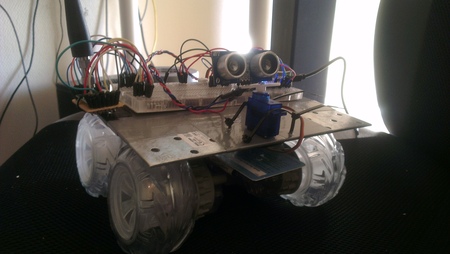
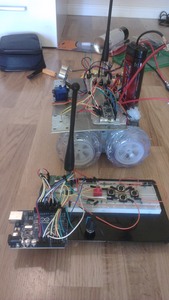
Robot laga av ein RC-bil frå biltema. Den har to modus
Modus 1: Roboten styrar seg sjølv automatisk vha. ping)))-sensoren. Den stoppar når den møter ei hindring, ser til kvar av sidene, og køyrer i den retninga der det er lengst til neste heindring.
Modus2: Roboten styrast med RF transieverar (nRF905).
\
\
Eg vil gjerne ha forslag til ekstra funksjonar eg kan legge til. Dette er ei eksamensoppgåve, så eg vil gjerne imponere sensor
